To the best of our knowledge, HE-Drive is the first human-like-centric end-to-end autonomous driving system, ensuring high performance while guaranteeing efficiency and comfort.
In this paper, we propose HE-Drive: the first human-like-centric end-to-end autonomous driving system to generate trajectories that are both temporally consistent and comfortable. Recent studies have shown that imitation learning-based planners and learning-based trajectory scorers can effectively generate and select accuracy trajectories that closely mimic expert demonstrations. However, such trajectory planners and scorers face the dilemma of generating temporally inconsistent and uncomfortable trajectories.
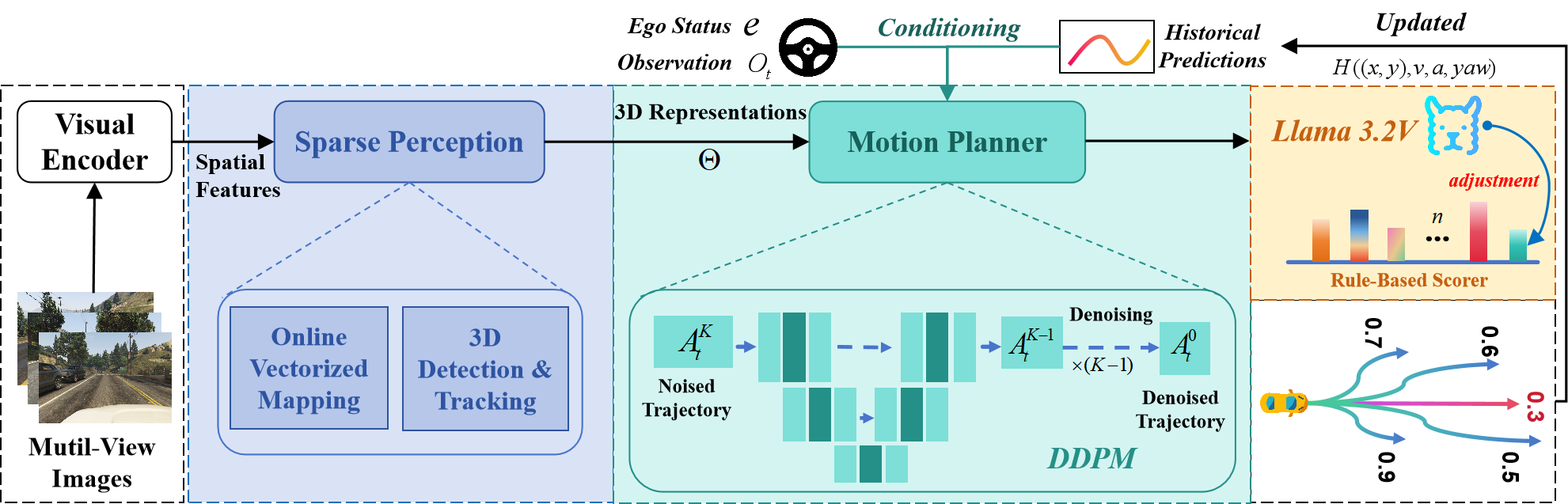
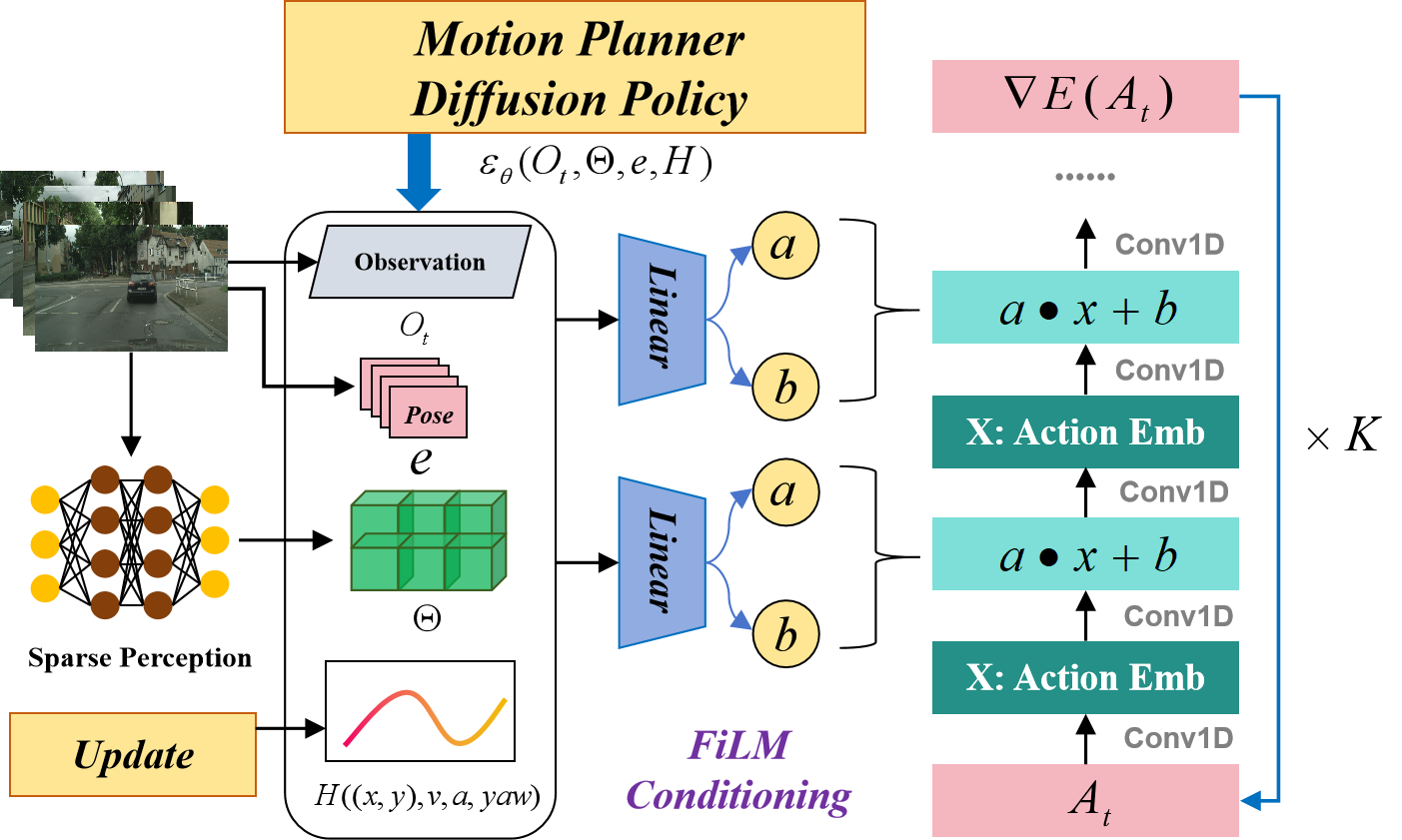
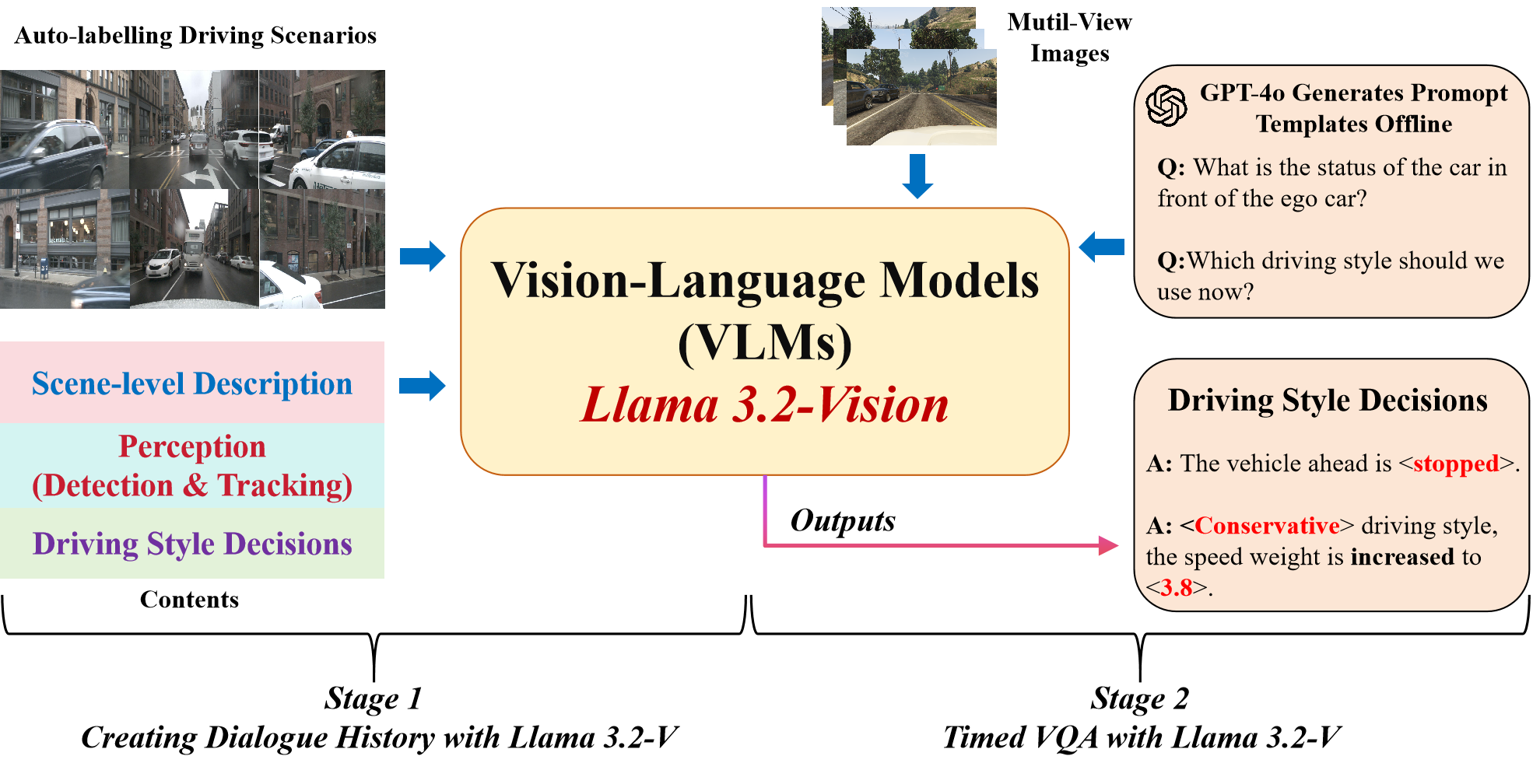
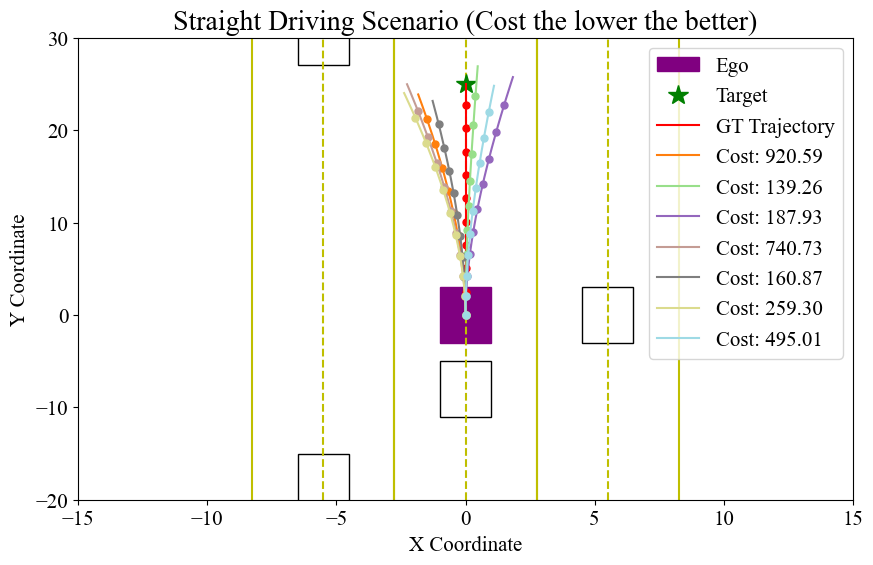
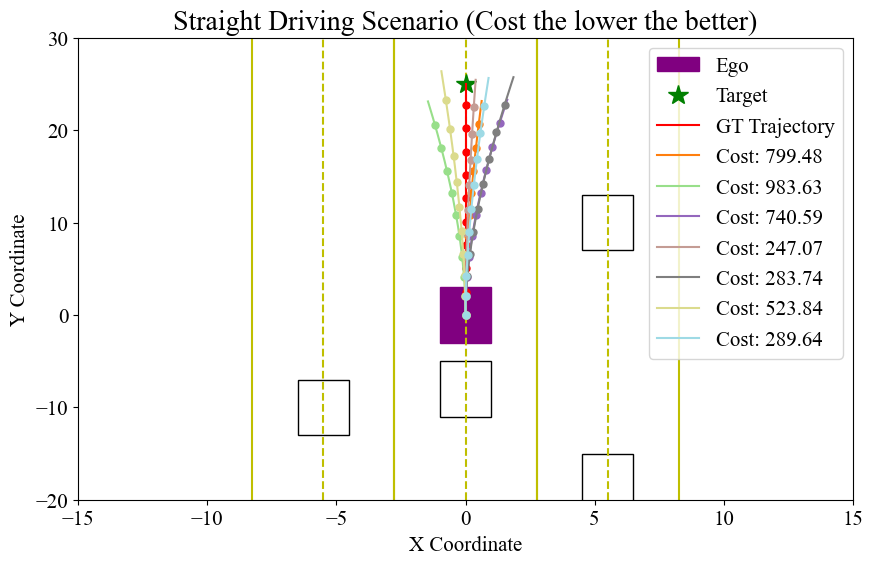
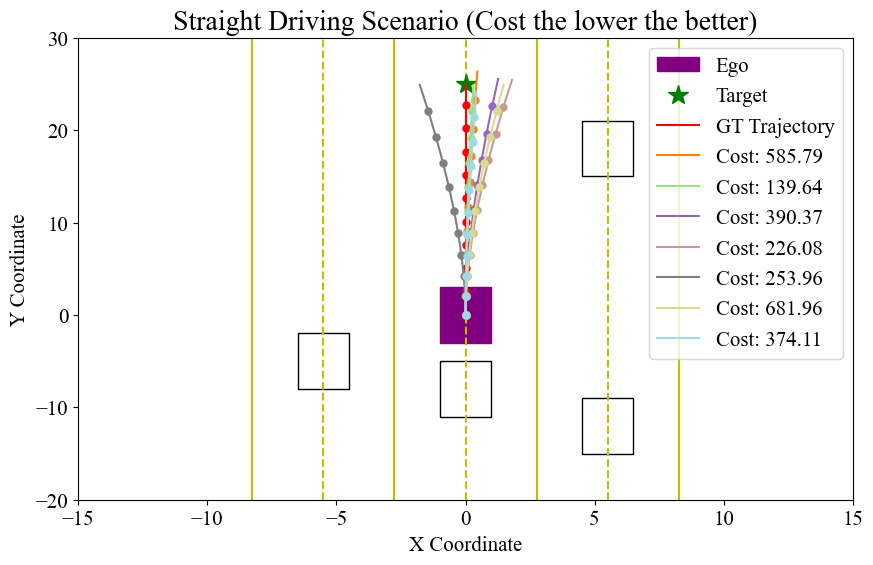
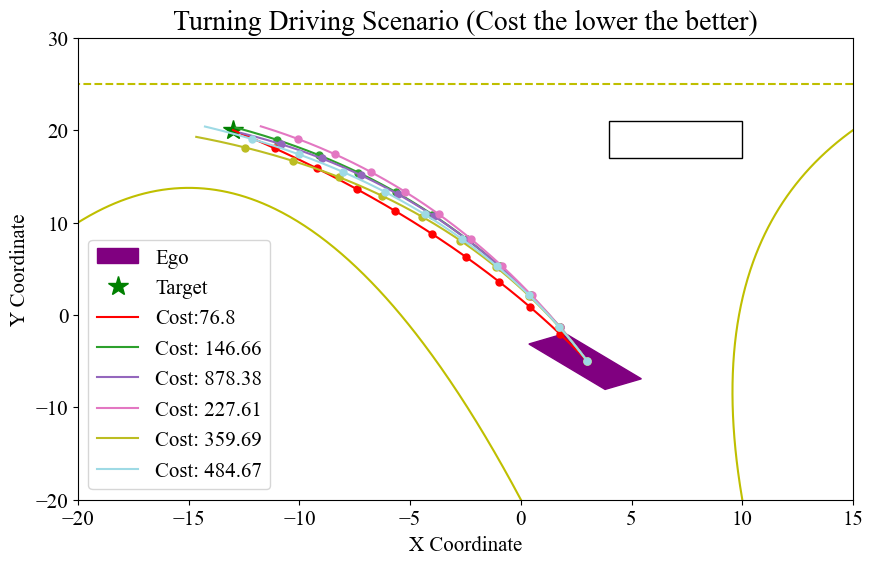
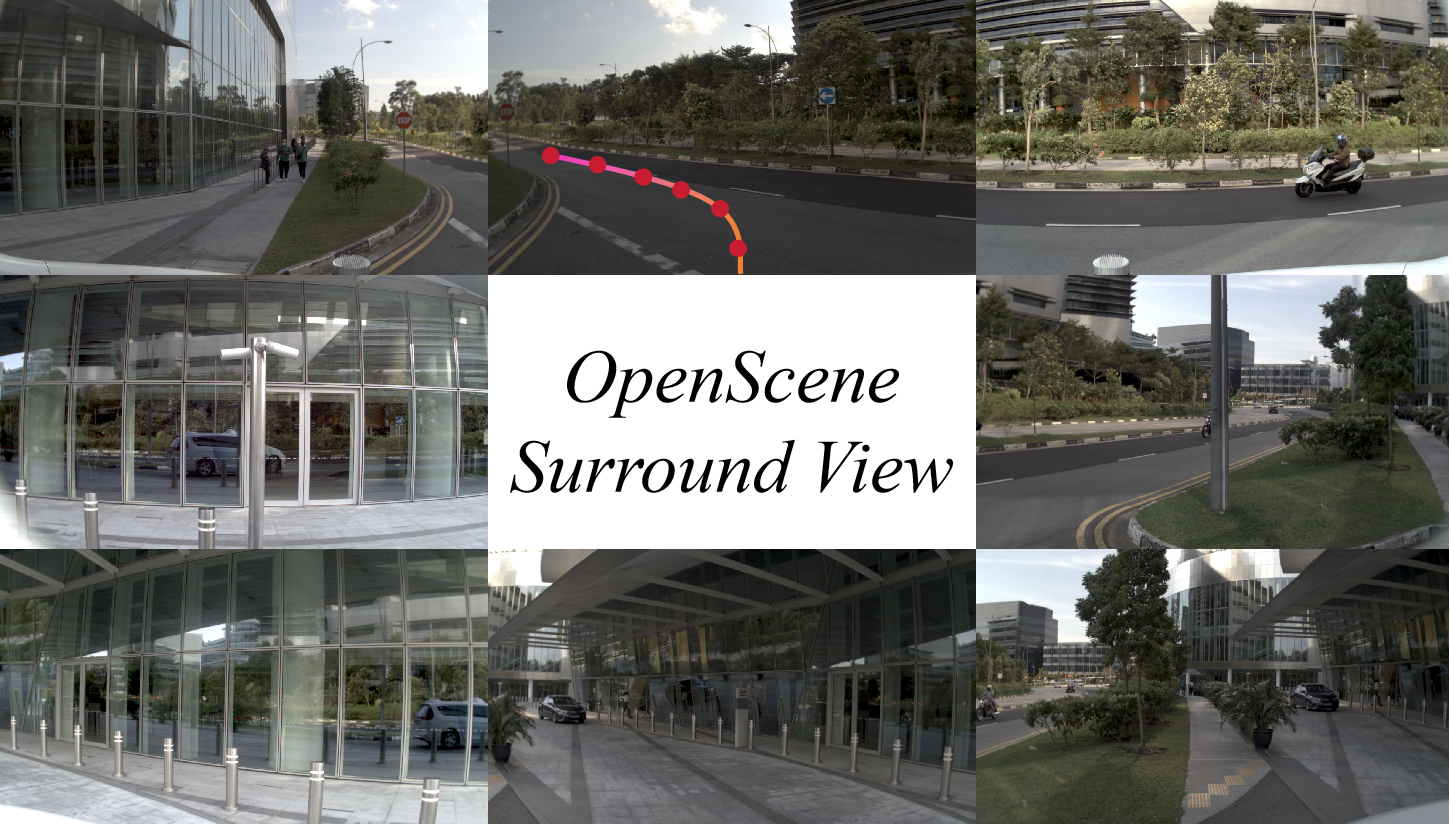
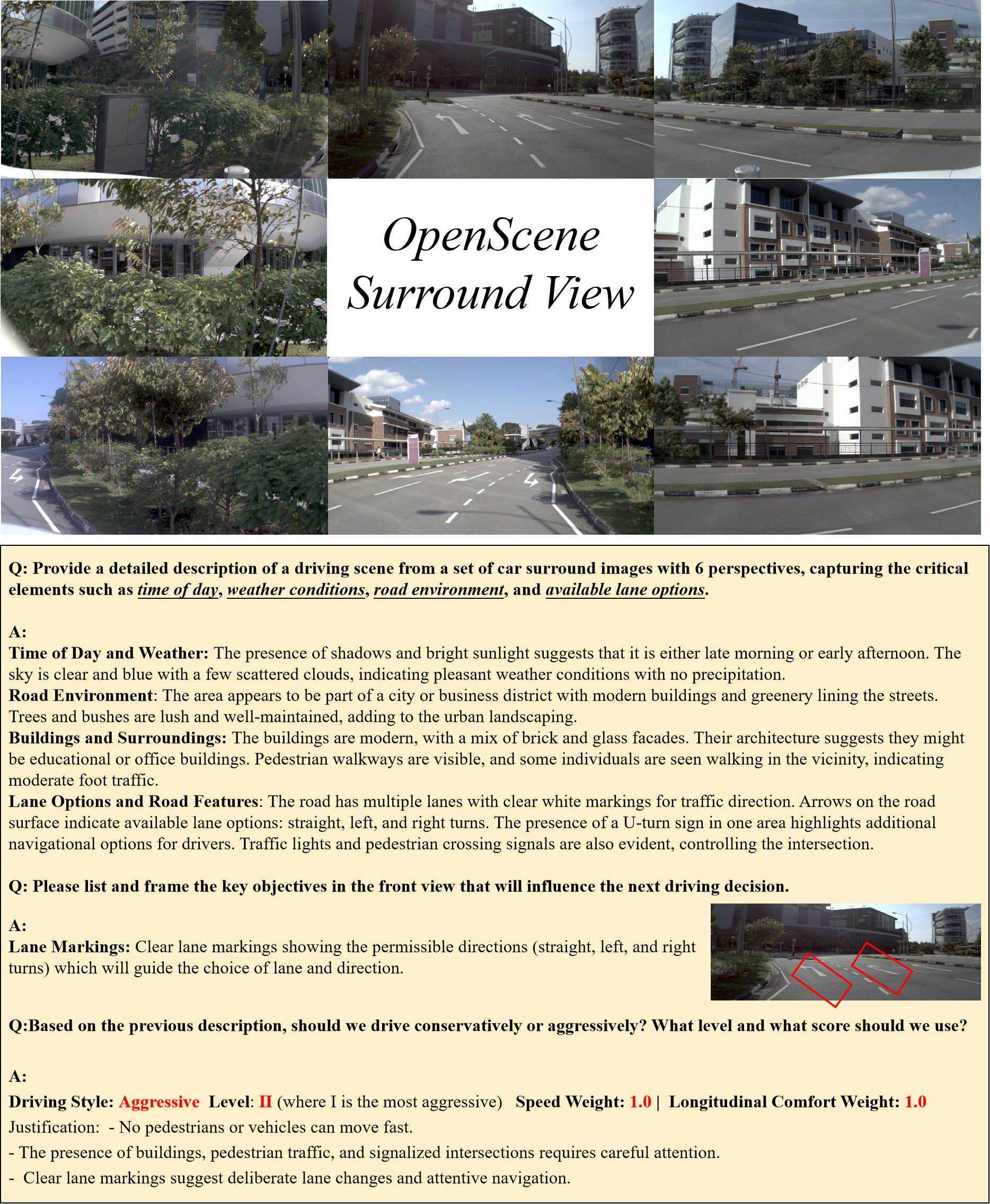
To solve the above problems, Our HE-Drive first extracts key 3D spatial representations through sparse perception, which then serves as conditional inputs for a Conditional Denoising Diffusion Probabilistic Models (DDPMs)-based motion planner to generate temporal consistency multi-modal trajectories. A Vision-Language Models (VLMs)-guided trajectory scorer subsequently selects the most comfortable trajectory from these candidates to control the vehicle, ensuring human-like end-to-end driving.
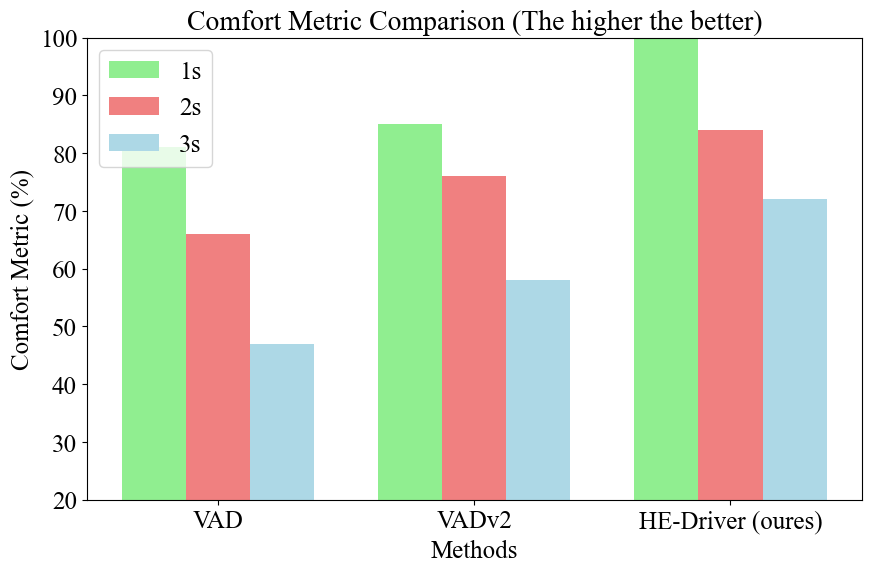
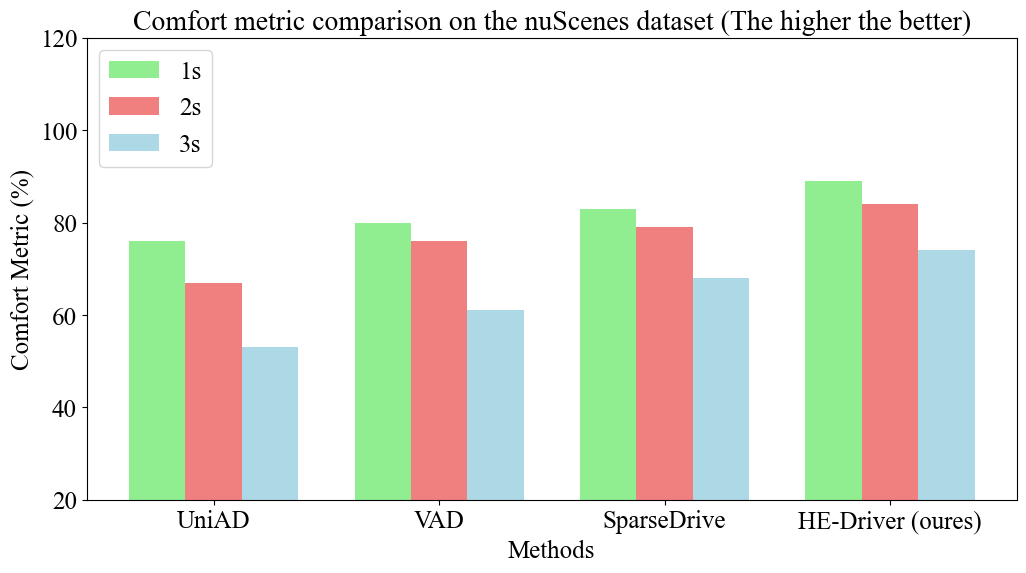
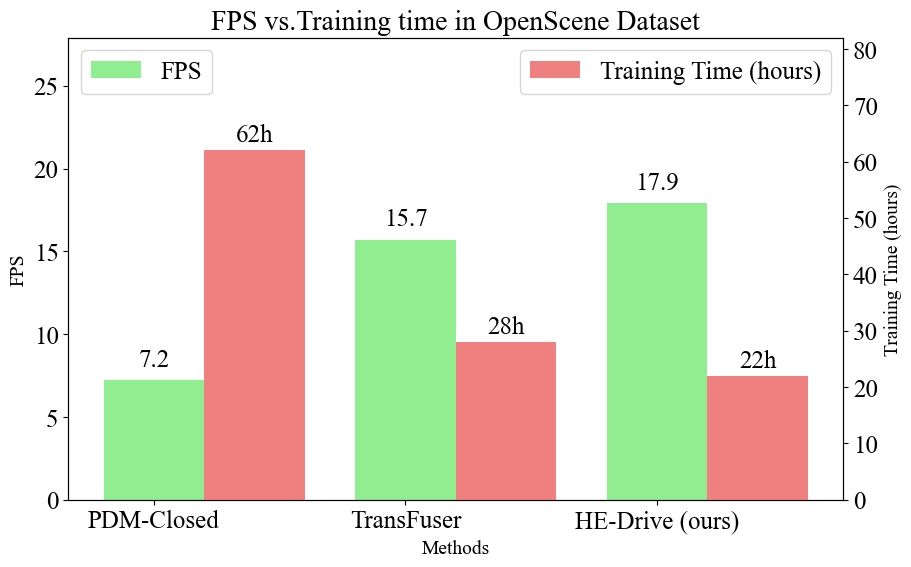
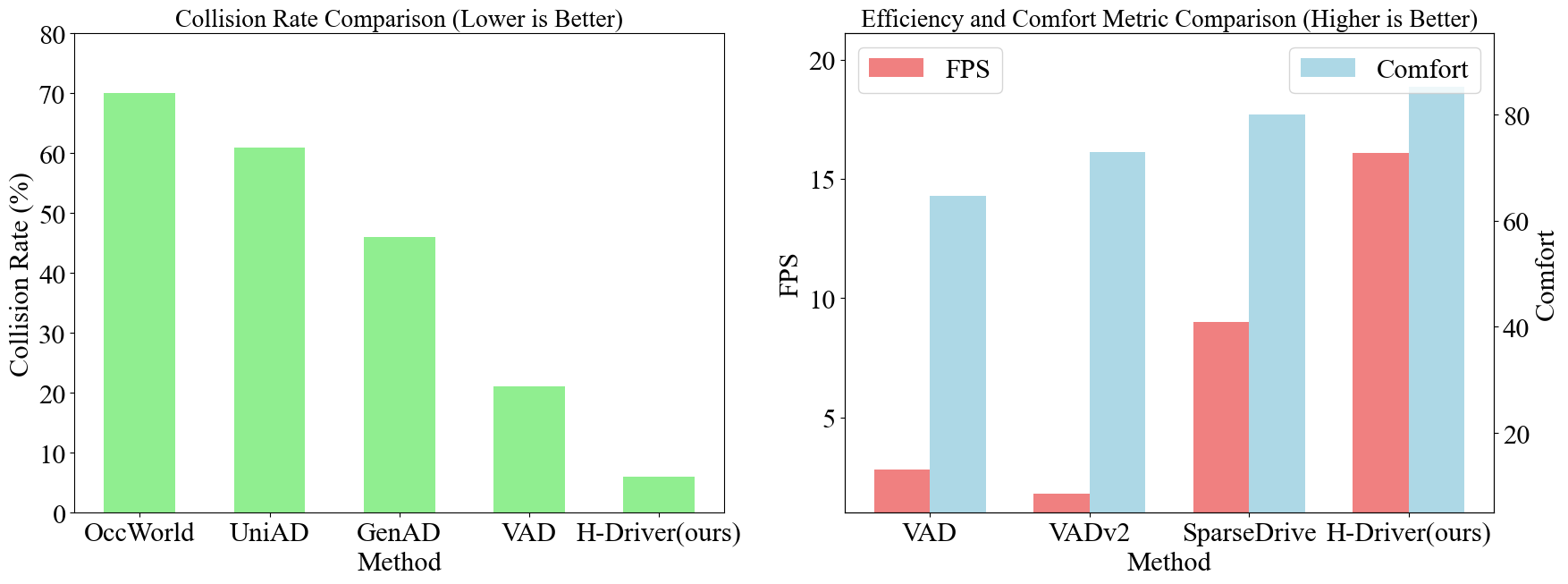
Experiments show that HE-Drive not only achieves state-of-the-art performance (i.e., reduces the average collision rate by 71% than VAD) and efficiency (i.e., 1.9X faster than SparseDrive) on the challenging nuScenes and OpenScene datasets but also provides the most comfortable driving experience on real-world data.